|
--------------------
|
|
Beginners' Guide
- Radio Control
The R/C pilot controls the model by a radio link, which means by using
electromagnetic radiation.
Basically the R/C equipment consists of a Transmitter operated by the pilot
and the airborne units consisting in a Receiver together with one or more
Servos depending on the number of channels used and a Battery pack.
The picture shows a four channel
RC Transmitter, Receiver, 4 Servos,
Battery pack and Switch.
|

|
A typical RC Transmitter has about 4 to 6 channels with at least 4 of them being
proportional, which means the controlled surfaces or devices will move
proportionally to the movements of the control sticks.
Additional channels may function only in "on-off" manner like a switch, and are
usually used to actuate retractable landing gears, airbrakes, lamps, etc.
The example above shows a five channel RC Transmitter with two joysticks
(left/right and up/down movement) enabling four proportional channels,
while the fifth channel is of switch type (on/off).
The example shows the mode two configuration (most common) having the
elevator control on the right joystick and the motor throttle on the left one.
The right joystick self centres in the both axis, whereas the left joystick only
self centres in left/right axis and "clicks" in the up/down axis in order to allow
the throttle setting.
The mode one configuration has the elevator control on the left joystick and
the throttle on the right one.
Most modern RC Transmitters have "dual-rate" facility, which means the pilot
may change the max throw angle of the control surfaces during the flight, e.g. the
max throw may be reduced when flying fast and increased when flying slow.
The possibility to choose exponential movement may be featured in some types.
Many Transmitters have a servo-reversing feature, which facilitates the servo
linkage assembly.
Other feature such as channel mixing enables V-tail configuration and flaperons.
Some Transmitters include a microprocessor and memory, enabling the user
to save different model configurations and settings.
Another facility is the so-called buddy box, which allows two compatible
transmitters being connected by a cable. This is used for training purposes
where a transmitter is held by the instructor and the other by the student.
The student may control the model as long as the instructor holds down a push-
button on his/her own transmitter.
Should the student get in trouble, the instructor releases the push-button, and
quickly takes over the control.
The RC Transmitter sends data to the RC Receiver by generating a modulated
radio frequency carrier, while the Receiver is tuned to detect the Transmitter's
carrier frequency.
The accuracy of sending and receiving frequencies are usually achieved by the
use of crystals.
The Receiver detects data from the modulated carrier, decodes and deliveries
it to the respective Servo.
Before the recent development, there were several Frequency Bands allocated
to Radio Control depending on the country.
Each Frequency Band was divided in several Channels.
In USA the Frequency Band for Model Aircraft was 72MHz, Channels 11 to 60 with
20KHz separation. And for surface models (Cars, Boats, Robots etc) was 75MHz,
Channels 61 to 90.
In most European countries the Frequency Band for Model Aircraft was 35MHz,
Channels 55 to 90. And for surface models is 40MHz (from 40.665 to 40.995).
Channel identification on 35MHz Band was done by an orange flag with a white
channel numeral.
Channel Numbers on 35 MHz Band |
| Channel |
Frequency |
Channel |
Frequency |
Channel |
Frequency |
55 |
34.950 |
67 |
35.070 |
79 |
35.190 |
56 |
34.960 |
68 |
35.080 |
80 |
35.200 |
57 |
34.970 |
69 |
35.090 |
81 |
35.210 |
58 |
34.980 |
70 |
35.100 |
82 |
35.220 |
59 |
34.990 |
71 |
35.110 |
83 |
35.230 |
60 |
35.000 |
72 |
35.120 |
84 |
35.240 |
61 |
35.010 |
73 |
35.130 |
85 |
35.250 |
62 |
35.020 |
74 |
35.140 |
86 |
35.260 |
63 |
35.030 |
75 |
35.150 |
87 |
35.270 |
64 |
35.040 |
76 |
35.160 |
88 |
35.280 |
65 |
35.050 |
77 |
35.170 |
89 |
35.290 |
66 |
35.060 |
78 |
35.180 |
90 |
35.300 |
It was possible to change the Frequency Channel by changing both transmitter
and receiver crystals. However, it was advisable to change only to a channel close
to the original transmitter frequency, which was tuned by the manufacturer, since
otherwise significant reduction in range might occur.
This problem was eliminated if the transmitter had a changeable RF power module.
The drawback was that the RF modules were more expensive than the crystals.
Some manufacturers begun offering synthesised radios, which enabled change of
channels at the field without the need to remove modules or crystals.
They were rather expensive though.
A new technology is called "Frequency-Hopping Spread Spectrum" (FHSS).
FHSS is a method of transmitting radio signals by rapidly changing the carrier
frequency among many frequencies within a large spectral band.
The changes are controlled by a code known to both transmitter and receiver.
Using the FHSS system means not having to worry about what frequency you're on.
It also reduces interference and avoid interception.
The Futaba 2.4GHz FASST system comes with a unique, permanent ID code
that is preset at the factory.
Pushing the Easy Link button locks the receiver to the transmitter using that code.
It's the only code that it will recognize - and since it has over 134 million possible
codes, there's no chance of a signal conflict.
The Futaba FASST is similar to FHSS, is believed to be better, but more expensive.

The new 2.4GHz technology has become part of the future R/C.
Additional spread spectrum techniques and variations of FHSS are used today.
Direct-Sequence Spread Spectrum (DSSS) is a related technique to FHSS.
It also spreads a transmitted signal across a large spectral band, but it does so
all at once instead of in discrete bursts separated by hops.
It can achieve higher throughput, but DSSS system is more susceptible to interference.
Modulation of the RF carrier
Most R/C systems today use frequency modulation (FM) as it better rejects
interference than the earlier amplitude modulation (AM).
Frequency Modulation means that the Transmitter sends data by changing its
carrier frequency with a deviation of for ex. +/- 1.5KHz from its nominal value.
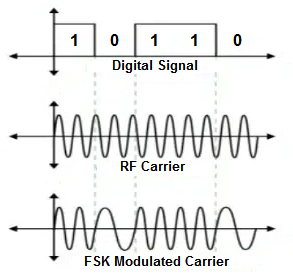
Digital Modulation
Several Digital Modulation techniques exist today, but the most common are:
FSK and PSK.
FSK stands for Frequency Shift Keying, where the digital signal logic 1 gives
a certain carrier frequency and the logic 0 a different frequency:
PSK stands for Phase Shift Keying, where each digital signal logic level gives
a unique phase shift to the carrier frequency.
The Transmitter RF power output combined with the Receiver sensitivity and
selectivity are the main factors that influence the transmitting quality and the
range limit of a particular outfit.
The Transmitter aerial is part of the final RF amplifier stage tuned circuit.
The aerial has a natural frequency resonance dependent upon its length.
Since at 35MHz the physical length corresponding to a wavelength is 8.6 meters,
the designers choose alternatives of 1/2 or 1/4 wavelength aerials in order to
be more practical for a hand held transmitter, despite the small reduction
in radiation efficiency.
Aerial efficiency may be improved if the designer fits a loading coil to increase
the effective length. The coil may either be located at base of the aerial inside
the transmitter case or outside, part away along the aerial length.
The latter is more efficient but makes aerial replacement more difficult since
re-tuning is needed.
There's a null in the radiation at the tip of a straight vertical rod aerial, so the
pilot should avoid pointing the aerial tip towards the model when flying at a
greater distance.
In order to achieve a good selectivity the Receiver design is often based on
Superheterodyne principle. There are two types:
The Single Conversion and the Double Conversion.
The block diagram below shows a typical Single Conversion Superhet. Receiver.
The Receiver's RF stage is tuned to the transmitter's frequency and also may
or not include a RF tuned amplifier.
A local crystal controlled oscillator operates at frequency usually 455kHz below
the incoming RF signal.
The local oscillator's frequency is mixed with the incoming RF signal at the
mixer stage and the difference of these two frequencies is amplified by several
tuned Intermediate Frequency circuits IF.
In case of an AM receiver it is required an Automatic Gain Control (AGC)
for the IF stage.
The data received is detected at detector stage and send to the decoder, which
in turn delivers it to each Servo.
However, the Single Conversion Superht. Receiver has some drawbacks that
may cause problems in model control applications.
The mixer stage produces a 455kHz output from both the incoming RF signal
and also from a signal 455kHz below the local oscillator frequency. This signal
is called the "image" and will cause interference if it enters the receiver.
There are also a number of other signal combinations that may cause the
generation of 455kHz IF such as, Second, Third, Fourth etc. harmonics of the
operating frequency and similar harmonics of the local oscillator plus and
minus 455kHz may also cause problems.
Many of these drawbacks can be overcome by using a Double Conversion
Superhet. Receiver. This concept uses two Intermediate Frequencies (IF) and
two crystal controlled oscillators.
The first Intermediate Frequency is higher than 455kHz, typically 10.7MHz.
Signals that could cause spurious responses are now beyond the passband of
the RF stage.
A second mixer reduces the 10.7MHz to 455kHz to obtain a good selectivity.
Due to its complexity, increased costs and added weight, such a design is
not widespread among the manufactured VHF equipment, but under some
severe operating conditions it may give the only solution to reliable performance.
Receivers are available in different shapes, sizes and weights.
- PPM System
There are several data encoding/decoding systems on the market today.
The older one is PPM (Pulse Position Modulation).
That's just the way the data is encoded/decoded, since the RF carrier is often
FM modulated on all systems.
The PPM encoding system consists of a data frame containing a synchronising
pulse followed by a number of shorter pulses equal to the number of channels.
The frame duration is about 20mS, which means the data is being send at a
frequency of about 50Hz.
The transmitter encoder circuit reads each control potentiometer's value and
switch's position sequentially, converting each value to a pulse width.
The width of each pulse corresponds to the respective Servo position.
A control in neutral position gives a pulse of 1.5mS and in the end position
may be either 1 or 2mS depending on which way the control has been moved.
- PCM System
PCM stands for Pulse Code Modulation.
The position of joy-sticks, switches and pots, originally analogue voltages are
digitised by an A/D converter to a 8 to 10 bits (256 to 1024 decimal) word.
For eight to ten servos means 80 -100 bits. With a further 16-32 bit checksum
per frame, synchronisation sequences and failsafe values, and a bit number of
100 -160 becomes necessary for a complete frame.
A bit length of 0.3mS (JR/Graupner and Futaba/Robbe) will produce a 30-48mS
frame time, considerably longer than about 20mS the PPM uses.
If even more secure bit lengths and 12 channels are used, this time is increased
to 55mS, e.g. Simprop (System 90), where only 6 channels are proportional and
6 are switched channels.
Actual PCM uses two systems to synchronise the transfer: an extra long starting
pulse made up of so many "1" or "0" bits, that it can never be mistaken for data,
or the so called half bit pulse, e.g. 2,5 bits, equally impossibly mistaken for data.
Usually this is followed by a synchronisation sequence, setting the receive-clock.
This is the clock that scans the middle of the bits upon reception.
This explains why, at the limits of the transmission range with PPM the servos
start to glitch, as noise causes the pulse flanks to vary (up to+/-30 us), while PCM
keeps them quiet, having half a bit (150 us) to play with.
The checksum in the shape of a 16 bit long CRC (Cyclic Redundancy Check)
provides an effective way to detect bit errors, but in no way corrects them.
This in turn means that, even if only one single bit error has crept in the ca. 100 -
160 bits total frame length, the checksum fails and the whole message is rejected.
The servos remain in their last correctly received position until the arrival of new,
correct data. If this takes too long (0.25-1 Sec), failsafe will take place, and
depending on the predefined settings, a chosen (and defined in the transmitter)
failsafe position or the last correctly received position will be activated.
To reduce the failure time, JR/Graupner (S-PCM) and Futaba/Robbe (PCM1024)
subdivided the frame using separate CRC checks.
This allows rejecting only a part of the faulty frame.
PCM advantages:
Servo movements without glitch, even if the model is far way.
Holding of the servo position during short glitches (Hold).
Moving the servo to a predefined position in case of a longer disturbance or
even complete failure of the transmitter (Fail-Safe).
Fast transmission if S-PCM20 or PCM 1024 is used, similar to PPM.
Servos are not damaged by pulses that are too long/short, which could happen
with PPM.
PCM disadvantages:
More expensive.
Sensitivity to adjacent channels is usually worse comparing with PPM receivers.
Care has to be taken when flying near to a transmitter from an adjacent channel.
Due to different protocols, only receivers from the same brand or even type of
the transmitter can be used.
Checking the transmission quality can be difficult, because the hold-mode
smooths out small glitches.
The lack of early warning signs often causes trouble.
Control problems that build up gradually, e.g. of a technical nature, get noticed
only when the connection fails completely, which may lead to a crash.
PPM advantages:
The PPM system is cheaper.
There should be no problems using different brands of receivers with different
transmitter manufacturers.
Transmission is fast enough to operate even the quickest of servos.
With PPM, the end of the transmission range is shown by the servos starting
to glitch. When the pilot notices this, he/she can probably still get the model
back home safely.
PPM disadvantages:
Due to its simplicity, PPM system cannot detect errors, the receiver does not
see the difference between valid and invalid servo pulses. When the range
boundaries are reached, pulses get slightly longer or shorter because of noise.
Servos start to glitch. This may happen when antenna orientation is not optimal,
when the projection of the receiver antenna is nearly down to a single point, the
signal breaks down and the servos get false pulses.
These short glitches go unnoticed most of the time because they are smoothed
out by the servo's and the model's inertia (response time).
Improvements can still be expected in the PPM sector, like the IPD system by
Multiplex, Scan-PLL by ACT or Scan2000 by Simprop.
Using a microprocessor in the receiver makes checking RC-pulses a possibility.
Failsafe and Hold, exclusive advantages of PCM so far, are now also possible
with PPM.
- IPD System
IPD stands for Intelligent Pulse Decoding, and the receiver incorporates
a processor, which analyses the incoming signal for validity.
Like a PCM system, IPD filters out invalid signals.
The difference between the systems is that the IPD receiver does not "switch off"
the "dirty" signal as field strength declines, but instead widens its tolerance.
This means that control becomes less precise as field strength falls away or
the transmission quality deteriorates, but remains usable for longer time and
greater range.
The result is that you can notice the approaching limit of range from the model's
behaviour, whereas PCM suddenly robs you of control.
When the signal is insufficient for the receiver to interpret, a fail-safe condition
occurs, thereby driving the servos to pre-selected safe positions.
The IPD receiver only considers a signal valid as long as its length lies within
the range 890 usec to 2350 usec. These are limit values, which cater for most
radio control transmitters.
The receiver analyses the signal, and adjusts it automatically in accordance with
the current reception quality, or field strength. Powerful signals are passed on
to the servos directly, but weaker signals are "post-processed".
This means that the IPD receiver calculates the nominal servo position from the
last "good" signals, which it picks up. This greatly reduces the effect of any
interference, but - in contrast to PCM - the pilot is made aware that there is a
problem during a longer period of time.
In this way the pilot receives a warning that all is not well and has more time to
respond appropriately.
The IPD receiver can operate with usual PPM formats, which means that all
standard FM PPM transmitters can be used in conjunction with these receivers.
IPD is faster than PCM because there are no check cycles.
- DSR System
DSR stands for Digital Signature Recognition and is used
by FMA's FS5 and FS8 dual conversion FM receivers.
It's claimed to provide the ultimate protection against
crashes when used along with FMA's Co-Pilot Flight
Stabilisation System.
The DSR receivers block the interference by memorising
the actual transmitter's unique signal frame and rejecting
all the others, even if they are in the same frequency...!
|

|
For further safety the receivers' Pre-flight Interference Check detects and warns
the pilot if there's another transmitter on the same frequency.
When turned-on these receivers analyse the data stream and automatically
checks for:
-positive or negative shift
-valid number of pulses (and stores this)
-valid frame length
-valid pulse widths
If a frame is damaged, the system invokes three levels of error correction to
attempt to restore the data. If the data fails to be restored for 50 consecutive
frames, the failsafe mode is enabled which sets the servos to either the "last
good frame" or the pre-set positions depending on the pilot's choice.
The Co-Pilot will hold the wings and nose level enabling the model to fly in a
stable and predictable flight path, giving the pilot time to find the problem and/or
to warn the spectators.
These receivers also include extensive flight data reporting capabilities via PC
while the most critical data can be read directly from the receiver.
The DSR receivers work with any standard FM - PPM transmitter.
The Co-Pilot monitors an aircraft's relationship to the earth's horizon by using
four infrared temperature sensors.
In the infrared spectrum, the earth is warm below the horizon, while the sky is
cold above the horizon.
During the flight, the Co-Pilot senses changes in the aircraft's attitude relative
to the horizon and sends corrective signals to the aileron and elevator servos in
order to keep the aircraft level.
If an extra channel is available, the pilot may turn the Co-Pilot on and off, and
adjust its sensitivity from the ground.
- CC2500 vs ELRS
CC2500 and ELRS refer to the protocols used by the TX's RF power module.
While both systems use 2.4GHz RF, they are two different communication
technologies used for wireless communication.
CC2500 is a chip made by Texas Instruments that allows for multiple protocols,
enabling the user to choose different protocols for connection with different
RX brands like Hitec, Futaba S-FHSS, FrSky D8/D16, Radiolink and Graupner.
It is a reliable communication module, but has shorter range, higher latency and
lower update rates compared to ELRS.
ELRS stands for Express Long Range System.
This system typically offers lower latency, higher update rates, and longer range.
There are the 2.4Ghz and the 900Mhz frequency band versions of ELRS system.
It's an open-source system, which usually has an active community support.
However, some users find the ELRS protocol more difficult to learn.
It's also important to consider the compatibility, since receivers that function
with one system don't function with the other.
An ELRS TX requires an ELRS RX with the same frequency and version.

Some transmitters have an expansion module bay on the back allowing for a
different external module to be plugged in, enabling the user to choose between
the external module and the factory built-in internal module via the trasmitter's
user interface.

<< Previous Page
 Next Page >>
Next Page >>
| |